publications
For the up-to-date publication list, please see Google Scholar or Semantic Scholar pages.
For coverage of research in press, please see Press & Media.
Preprints
Papers (peer-reviewed)
-
 IEEE International Conference on Robotics and Automation (ICRA), 2026
IEEE International Conference on Robotics and Automation (ICRA), 2026 -
 IEEE International Conference on Robotics and Automation (ICRA), 2026
IEEE International Conference on Robotics and Automation (ICRA), 2026 -
 IEEE International Conference on Robotics and Automation (ICRA), 2026
IEEE International Conference on Robotics and Automation (ICRA), 2026 -
 Nature Machine Intelligence, 2026
Nature Machine Intelligence, 2026 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2025
IEEE International Conference on Intelligent Robots and Systems (IROS), 2025 -
 Conference on Robot Learning (CoRL), 2025
Conference on Robot Learning (CoRL), 2025 -
 Conference on Robot Learning (CoRL), 2025
Conference on Robot Learning (CoRL), 2025 -
 Conference on Robot Learning (CoRL), 2025
Conference on Robot Learning (CoRL), 2025 -
 IEEE International Conference on Robotics and Automation (ICRA), 2025
IEEE International Conference on Robotics and Automation (ICRA), 2025 -
 IEEE International Conference on Robotics and Automation (ICRA), 2025
IEEE International Conference on Robotics and Automation (ICRA), 2025 -
 IEEE International Conference on Robotics and Automation (ICRA), 2025
IEEE International Conference on Robotics and Automation (ICRA), 2025 -
 International Conference on Learning Representations (ICLR), 2025
International Conference on Learning Representations (ICLR), 2025 -
 International Conference on Learning Representations (ICLR), 2025
International Conference on Learning Representations (ICLR), 2025 -
 International Symposium on Robotics Research (ISRR), 2024
International Symposium on Robotics Research (ISRR), 2024 -
 International Symposium on Robotics Research (ISRR), 2024
International Symposium on Robotics Research (ISRR), 2024 -
 Advances in Neural Information Processing Systems (NeurIPS), 2024
Advances in Neural Information Processing Systems (NeurIPS), 2024 -
 Conference on Robot Learning (CoRL), 2024
Conference on Robot Learning (CoRL), 2024 -
 Conference on Robot Learning (CoRL), 2024
Conference on Robot Learning (CoRL), 2024 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2024
IEEE International Conference on Intelligent Robots and Systems (IROS), 2024 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2024
IEEE International Conference on Intelligent Robots and Systems (IROS), 2024 -
 International Conference on Machine Learning (ICML), 2024
International Conference on Machine Learning (ICML), 2024 -
 IEEE International Conference on Robotics and Automation (ICRA), 2024
IEEE International Conference on Robotics and Automation (ICRA), 2024 -
 IEEE International Conference on Robotics and Automation (ICRA), 2024
IEEE International Conference on Robotics and Automation (ICRA), 2024 -
 IEEE International Conference on Robotics and Automation (ICRA), 2024
IEEE International Conference on Robotics and Automation (ICRA), 2024 -
 Advances in Neural Information Processing Systems (NeurIPS, 2023
Advances in Neural Information Processing Systems (NeurIPS, 2023 -
-
 Conference on Robot Learning (CoRL), 2023
Conference on Robot Learning (CoRL), 2023 -
 Transactions on Machine Learning Research (TMLR), 2023Survey Certification
Transactions on Machine Learning Research (TMLR), 2023Survey Certification -
 Journal of Medical Robotics Research (JMRR), 2023
Journal of Medical Robotics Research (JMRR), 2023 -
 IEEE International Conference on Robotics and Automation (ICRA), 2023
IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 IEEE International Conference on Robotics and Automation (ICRA), 2023
IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 IEEE International Conference on Robotics and Automation (ICRA), 2023
IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 IEEE International Conference on Robotics and Automation (ICRA), 2023
IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 IEEE International Conference on Robotics and Automation (ICRA), 2023
IEEE International Conference on Robotics and Automation (ICRA), 2023 -
 International Conference on Learning Representations (ICLR), 2023
International Conference on Learning Representations (ICLR), 2023 - International Conference on Learning Representations (ICLR), 2023
-
 IEEE Robotics and Automation Letters (RA-L) and ICRA, 2023
IEEE Robotics and Automation Letters (RA-L) and ICRA, 2023 -
 Integration of reinforcement learning in a virtual robotic surgical simulation.Journal of Surgical Innovation, 2023
Integration of reinforcement learning in a virtual robotic surgical simulation.Journal of Surgical Innovation, 2023 -
 Digital pipette: open hardware for liquid transfer in self-driving laboratories.Digital Discovery, 2023
Digital pipette: open hardware for liquid transfer in self-driving laboratories.Digital Discovery, 2023 -

-
 Autonomous Robots (AURO), 2023
Autonomous Robots (AURO), 2023 -
 Conference on Robot Learning (CoRL), 2022
Conference on Robot Learning (CoRL), 2022 -
 Conference on Robot Learning (CoRL), 2022
Conference on Robot Learning (CoRL), 2022 -
 Advances in Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks, 2022
Advances in Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks, 2022 -
 Advances in Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks, 2022
Advances in Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks, 2022 -
 Advances in Neural Information Processing Systems (NeurIPS), 2022
Advances in Neural Information Processing Systems (NeurIPS), 2022 -
 IEEE Transactions on Neural Networks and Learning Systems, 2022
IEEE Transactions on Neural Networks and Learning Systems, 2022 - IEEE Asilomar Conference on Signals, Systems, and Computers, 2022
-
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2022
IEEE International Conference on Intelligent Robots and Systems (IROS), 2022 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2022
IEEE International Conference on Intelligent Robots and Systems (IROS), 2022 -
 Transactions on Pattern Analysis and Machine Intelligence (PAMI), 2022
Transactions on Pattern Analysis and Machine Intelligence (PAMI), 2022 -
 International Conference on Machine Learning (ICML), 2022
International Conference on Machine Learning (ICML), 2022 -
 Learning for Dynamics and Control (L4DC), 2022
Learning for Dynamics and Control (L4DC), 2022 -
 Workshop on Algorithmic Foundations of Robotics (WAFR), 2022
Workshop on Algorithmic Foundations of Robotics (WAFR), 2022 -
 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022 -
 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022 -
 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022 -
 International Conference on Learning Representations (ICLR), 2022
International Conference on Learning Representations (ICLR), 2022 -
 International Conference on Learning Representations (ICLR), 2022
International Conference on Learning Representations (ICLR), 2022 -
 International Conference on Learning Representations (ICLR), 2022
International Conference on Learning Representations (ICLR), 2022 -
 IEEE Robotics and Automation Letters (RA-L) and ICRA, 2022
IEEE Robotics and Automation Letters (RA-L) and ICRA, 2022 -
 International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), 2022
International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), 2022 - Confernce on Artificial Intelligence (AAAI), 2022
-
 Neural Information Processing Systems (NeurIPS) Competitions and Demonstrations Track, 2021
Neural Information Processing Systems (NeurIPS) Competitions and Demonstrations Track, 2021 -
 Advances in Neural Information Processing Systems (NeurIPS), 2021
Advances in Neural Information Processing Systems (NeurIPS), 2021 -
 Advances in Neural Information Processing Systems (NeurIPS), 2021
Advances in Neural Information Processing Systems (NeurIPS), 2021 -
 Advances in Neural Information Processing Systems (NeurIPS), 2021
Advances in Neural Information Processing Systems (NeurIPS), 2021 -
 Conference on Robot Learning (CoRL), 2021
Conference on Robot Learning (CoRL), 2021 -
 Conference on Robot Learning (CoRL), 2021
Conference on Robot Learning (CoRL), 2021 -
 Conference on Robot Learning (CoRL), 2021
Conference on Robot Learning (CoRL), 2021 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2021
IEEE International Conference on Intelligent Robots and Systems (IROS), 2021 -
-
 Robotics: Systems and Science (RSS), 2021
Robotics: Systems and Science (RSS), 2021 -
 Robotics: Systems and Science (RSS), 2021
Robotics: Systems and Science (RSS), 2021 -
 International Conference on Machine Learning (ICML), 2021
International Conference on Machine Learning (ICML), 2021 -
 International Conference on Machine Learning (ICML), 2021
International Conference on Machine Learning (ICML), 2021 -
 International Conference on Machine Learning (ICML), 2021
International Conference on Machine Learning (ICML), 2021 -
 International Conference on Machine Learning (ICML), 2021
International Conference on Machine Learning (ICML), 2021 -
 IEEE International Conference on Robotics and Automation (ICRA), 2021
IEEE International Conference on Robotics and Automation (ICRA), 2021 -
 IEEE International Conference on Robotics and Automation (ICRA), 2021
IEEE International Conference on Robotics and Automation (ICRA), 2021 -
 IEEE International Conference on Robotics and Automation (ICRA), 2021
IEEE International Conference on Robotics and Automation (ICRA), 2021 -
 IEEE International Conference on Robotics and Automation (ICRA), 2021
IEEE International Conference on Robotics and Automation (ICRA), 2021 -
 International Conference on Learning Representations (ICLR), 2021
International Conference on Learning Representations (ICLR), 2021 -
 International Conference on Learning Representations (ICLR), 2021
International Conference on Learning Representations (ICLR), 2021 -
 International Conference on Learning Representations (ICLR), 2021
International Conference on Learning Representations (ICLR), 2021 -
 Confernce on Artificial Intelligence (AAAI), 2021
Confernce on Artificial Intelligence (AAAI), 2021 -
 Transactions on Pattern Analysis and Machine Intelligence (PAMI), 2021
Transactions on Pattern Analysis and Machine Intelligence (PAMI), 2021 -
 Advances in Neural Information Processing Systems 33 (NeurIPS), 2020
Advances in Neural Information Processing Systems 33 (NeurIPS), 2020 -
 Advances in Neural Information Processing Systems 33 (NeurIPS), 2020
Advances in Neural Information Processing Systems 33 (NeurIPS), 2020 -
 Advances in Neural Information Processing Systems 33 (NeurIPS), 2020
Advances in Neural Information Processing Systems 33 (NeurIPS), 2020 -
 Conference on Robot Learning (CoRL), 2020
Conference on Robot Learning (CoRL), 2020 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2020
IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 -
 Conference on Uncertainty in Artificial Intelligence (UAI), 2020
Conference on Uncertainty in Artificial Intelligence (UAI), 2020 -
-
 International Conference on Machine Learning (ICML), 2020
International Conference on Machine Learning (ICML), 2020 -
-
 IEEE International Conference on Robotics and Automation (ICRA), 2020
IEEE International Conference on Robotics and Automation (ICRA), 2020 -
 IEEE International Conference on Robotics and Automation (ICRA), 2020
IEEE International Conference on Robotics and Automation (ICRA), 2020 -
 IEEE International Conference on Robotics and Automation (ICRA), 2020
IEEE International Conference on Robotics and Automation (ICRA), 2020 -
 IEEE International Conference on Robotics and Automation (ICRA), 2020
IEEE International Conference on Robotics and Automation (ICRA), 2020 -
 IEEE Transactions on Robotics (TRO), 2020
IEEE Transactions on Robotics (TRO), 2020 -
 IEEE International Conference on Intelligent Robots and Systems (IROS), 2019
IEEE International Conference on Intelligent Robots and Systems (IROS), 2019 - IEEE International Conference on Intelligent Robots and Systems (IROS), 2019
-
 Conference on Robot Learning (CoRL), 2019
Conference on Robot Learning (CoRL), 2019 -
 Conference on Robot Learning (CoRL), 2019
Conference on Robot Learning (CoRL), 2019 - International Journal of Robotics Research (IJRR), 2019
-
 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019 -
 IEEE International Conference on Robotics and Automation (ICRA), 2019
IEEE International Conference on Robotics and Automation (ICRA), 2019 -
 IEEE International Conference on Robotics and Automation (ICRA), 2019
IEEE International Conference on Robotics and Automation (ICRA), 2019 -
 Robotics: Systems and Science (RSS), 2018
Robotics: Systems and Science (RSS), 2018 - International Journal of Robotics Research (IJRR), 2018
-
 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018 -
 IEEE International Conference on Robotics and Automation (ICRA), 2018
IEEE International Conference on Robotics and Automation (ICRA), 2018 - IEEE Winter Conference on Applications of Computer Vision (WACV), 2018
- International Symposium on Robotics Research (ISRR), 2017
- International Journal of Robotics Research (IJRR), 2017
- IEEE Conference on 3D Vision (3DV), 2017
- IEEE International Conference on Intelligent Robots and Systems (IROS), 2017
- IEEE International Conference on Robotics and Automation (ICRA), 2017
- Workshop on Algorithmic Foundations of Robotics (WAFR), 2016
-
 IEEE International Conference on Automation Science & Engg. (CASE), 2016
IEEE International Conference on Automation Science & Engg. (CASE), 2016 - IEEE International Conference on Robotics & Automation (ICRA), 2016
-
 IEEE International Conference on Robotics & Automation (ICRA), 2016
IEEE International Conference on Robotics & Automation (ICRA), 2016 -
 IEEE International Conference on Automation Science & Engg. (CASE), 2016
IEEE International Conference on Automation Science & Engg. (CASE), 2016 -
 IEEE International Conference on Automation Science & Engg. (CASE), 2015
IEEE International Conference on Automation Science & Engg. (CASE), 2015 -
 IEEE International Conference on Robotics & Automation (ICRA), 2015
IEEE International Conference on Robotics & Automation (ICRA), 2015 - Transition State Clustering: Unsupervised Surgical Trajectory Segmentation For Robot Learning.International Symposium on Robotics Research (ISRR), 2015
- Journal of Applied Clinical Medical Physics (JACMP), 2015
- IEEE International Conference on Automation Science & Engg. (CASE), 2014
- IEEE Transactions on Automation Science and Engineering (TASE), 2013
- IEEE International Conference on Automation Science & Engg. (CASE), 2013
-
 IEEE International Conference on Automation Science & Engg. (CASE), 2012
IEEE International Conference on Automation Science & Engg. (CASE), 2012 - Radiotherapy and Oncology, 2012
- Object Identification and Mapping using Monocular Vision in an Autonomous Urban Driving System.International Conference of Machine Vision, 2010




Workshops
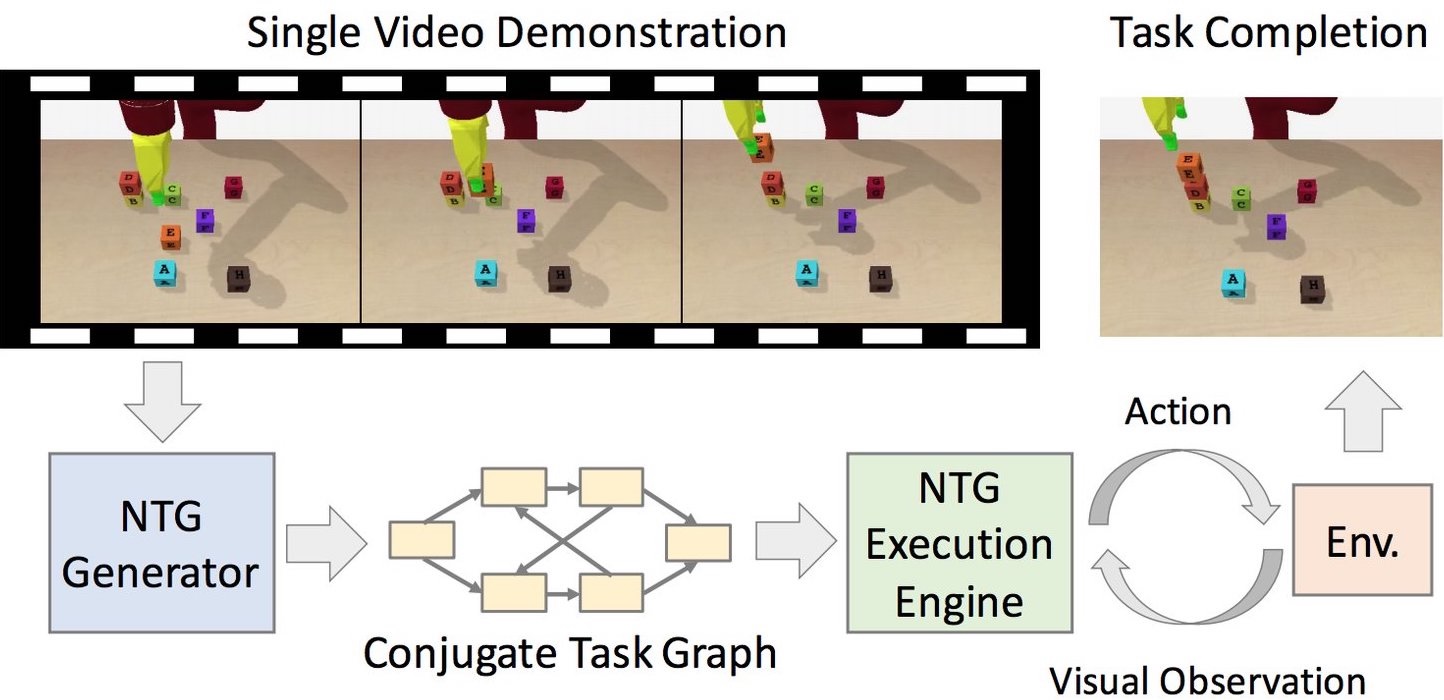
- Hierarchical Task Generalization with Neural Programs.2017
-
- Automated Delivery Instrument for Stem Cell Treatment Using the daVinci Robotic Surgical System.2015
Tech Reports

Theses
- University of California, Berkeley, 2016
- EECS Department, University of California, Berkeley, 2016
Patents
- 2025US Patent App. 18/947,237 (pending)
-
- 2024US Patent App. 18/319,546 (pending)
- 2024US Patent App. 18/227,560 (pending)
- 2024US Patent 11,958,529
- 2024US Patent App. 18/122,594 (pending)
-
-
-
- 2023US Patent App. 17/856,699 (pending)
-
- 2022US Patent 11,529,205
-
- 2022US Patent App. 17/678,666 (pending)
- 2022US Patent App. 16/945,753 (pending)
- 2022US Patent App. 16/925,085 (pending)
- 2021US Patent App. 16/785,044 (pending)